科傻(COSA)平差软件操作方法
“测量工程控制与施工测量内外业一体化和数据处理自动化系统”简称科傻系统(COSA),意即用高科技集成的傻瓜式测量数据采集和处理系统。它将测量学基本原理和现代科技相结合,对电子全站仪(TPS)、电子水准仪(ELI)、全球定位系统(GNSS)以及常规地面测量仪器进行系统的开发,以工程控制测量、施工测量和碎部测量等测量工程为对象,实现了从外业数据采集、质量检核、预处理到网平差等内业数据处理、成果报表输出的一体化和自动化作业流程。
科傻系统(COSA)是“测量工程控制与施工测量内外业一体化和数据处理自动化系统”的简称,包括COSA CODAPS 、 COSA EREPS和 COSA GPS三个子系统。COSA CODAPS在IBM兼容机上运行。
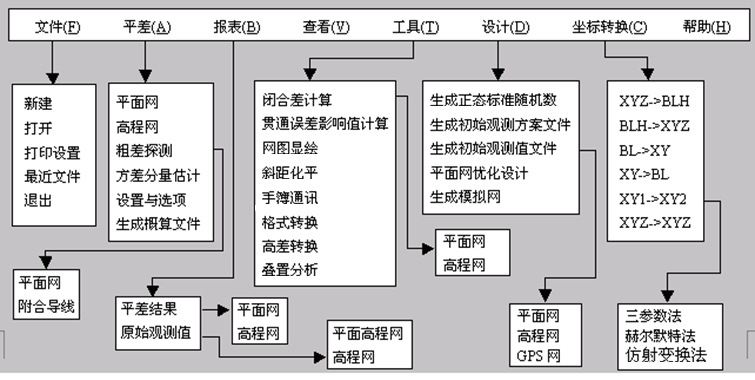
COSA CODAPS系统除具有概算、平差、精度评定及成果输出等功能外,还提供了许多实用的功能,如网的模拟设计、网图显绘、粗差剔除、方差分量估计、贯通误差影响值计算及闭合差计算等。
该系统不同于其它现有控制网平差系统的最大特点是自动化程度高,通用性强,处理速度快,解算容量大。其自动化表现在通过和COSA子系统COSA EREPS相配合可以做到由外业数据采集、检查到内业概算、平差和成果报表输出的自动化数据处理流程 其通用性表现在对控制网的网形、等级和网点编号没有任何限制,无须给出冗余的附加信息,就可以处理任意结构的水准网和平面网;其解算速度快,解算容量大表现在采用稀疏矩阵压缩存储、网点优化排序和虚拟内存等技术,在主频166MHZ的586微机上,解算800个点的平面和水准控制网不到1分钟;在具有 30MB 剩余硬盘空间的微机上,可以解算多达6000个点的平面控制网。
控制网平差:文件名规则、控制网观测文件格式、网平差过程及结果、设置及选项。
(1)文件名规则
科傻COSA系统处理对象是控制网,每一个控制网都有一个控制网名,与某一控制网相关的所有文件,其文件名约定为以控制网名作为主文件名,用不同的后缀来表示该网的不同类型文件。
常用文件类型:
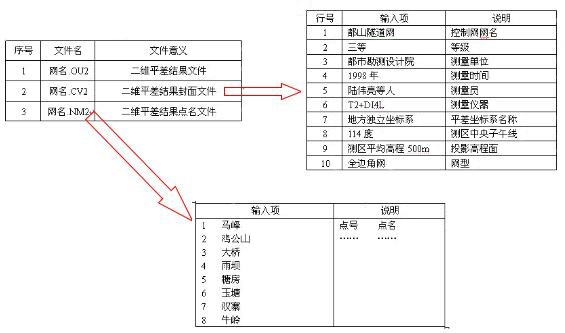
网名.in2,平面观测文件;网名.ou2,平面网平差结果文件;网名.map,平面网绘图文件;网名.clo,平面网闭合差计算输出文件。
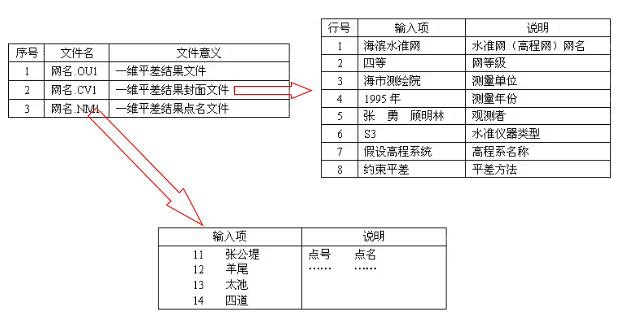
网名.in1,水准(高程)观测文件;网名.ou1,水准(高程)平差结果文件;网名.gco,高程网闭合差计算输出文件。
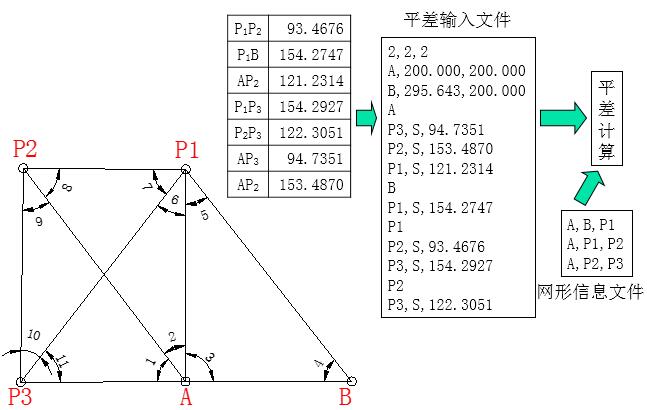
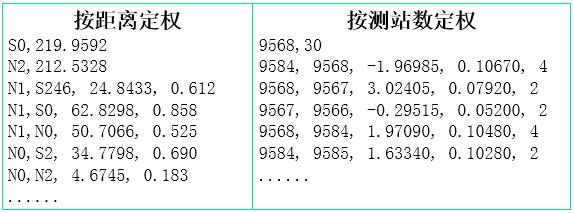
平面观测文件:
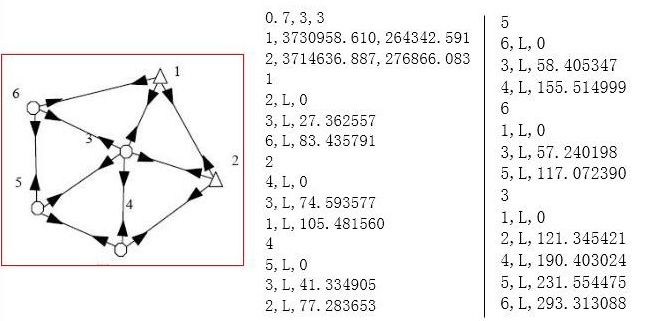
平面网示例:
1.768,1,1
CPII-12,3377095.440,456568.755
CPII-11,3377481.525,456242.099
CPII-11
CPII-12,L,0
JM-4,L,115.59005
JM-4,S,302.7269
JM-4
CPII-11,L,0
JM-5,L,24.541283
JM-5,S,396.2390
JM-5
JM-4,L,0
JM-6,L,260.5300
JM-6,S,225.4115
JM-6
JM-5,L,0
CPII-12,L,91.360083
CPII-12,S,237.0488
CPII-12
JM-6,L,0
CPII-11,L,46.37475
CPII-11,S,0
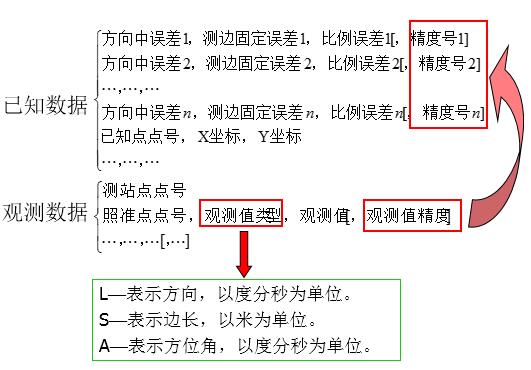
平面网示例说明:
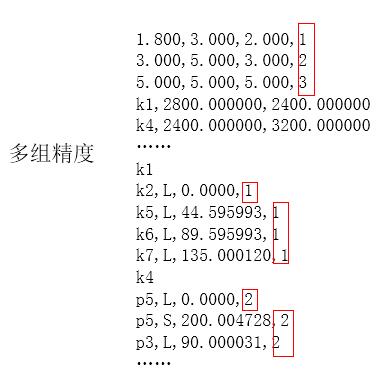
1.768,1,1【1.768:方向中误差,1:测边固定误差,1:测边比例误差】
CPII-12,3377095.440,456568.755【已知点号,坐标X,坐标Y】
CPII-11,3377481.525,456242.099【已知点号,坐标X,坐标Y】
CPII-11【测站点号】
CPII-12,L,0【后视点号,角度归零】
JM-4,L,115.59005【前视点号,观测角度】
续上页
JM-4,S,302.7269 【前视点号,观测距离】
JM-4【测站点号】
CPII-11,L,0【后视点号,角度归零】
JM-5,L,24.541283【前视点号,观测角度】
JM-5,S,396.2390 【前视点号,观测距离】
JM-5【测站点号】
JM-4,L,0【后视点号,角度归零】
JM-6,L,260.5300【前视点号,观测角度】
JM-6,S,225.4115【前视点号,观测距离】
JM-6【测站点号】
JM-5,L,0【后视点号,角度归零】
CPII-12,L,91.360083【前视点号,观测角度】
CPII-12,S,237.0488【前视点号,观测距离】
CPII-12【测站点号】
JM-6,L,0【后视点号,角度归零】
CPII-11,L,46.37475【前视点号,观测角度】
CPII-11,S,0【前视点号,观测距离,距离0:CPII-12~CPII-11为已知边长,可忽略】
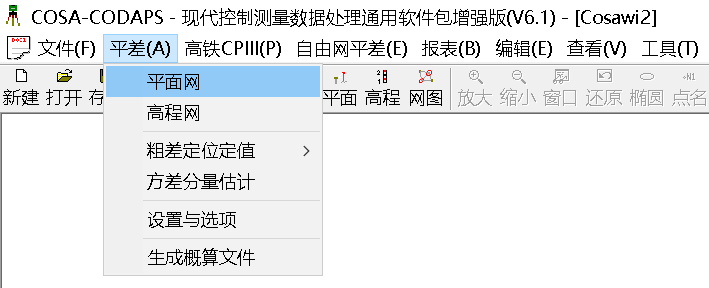
(2)平面网平差
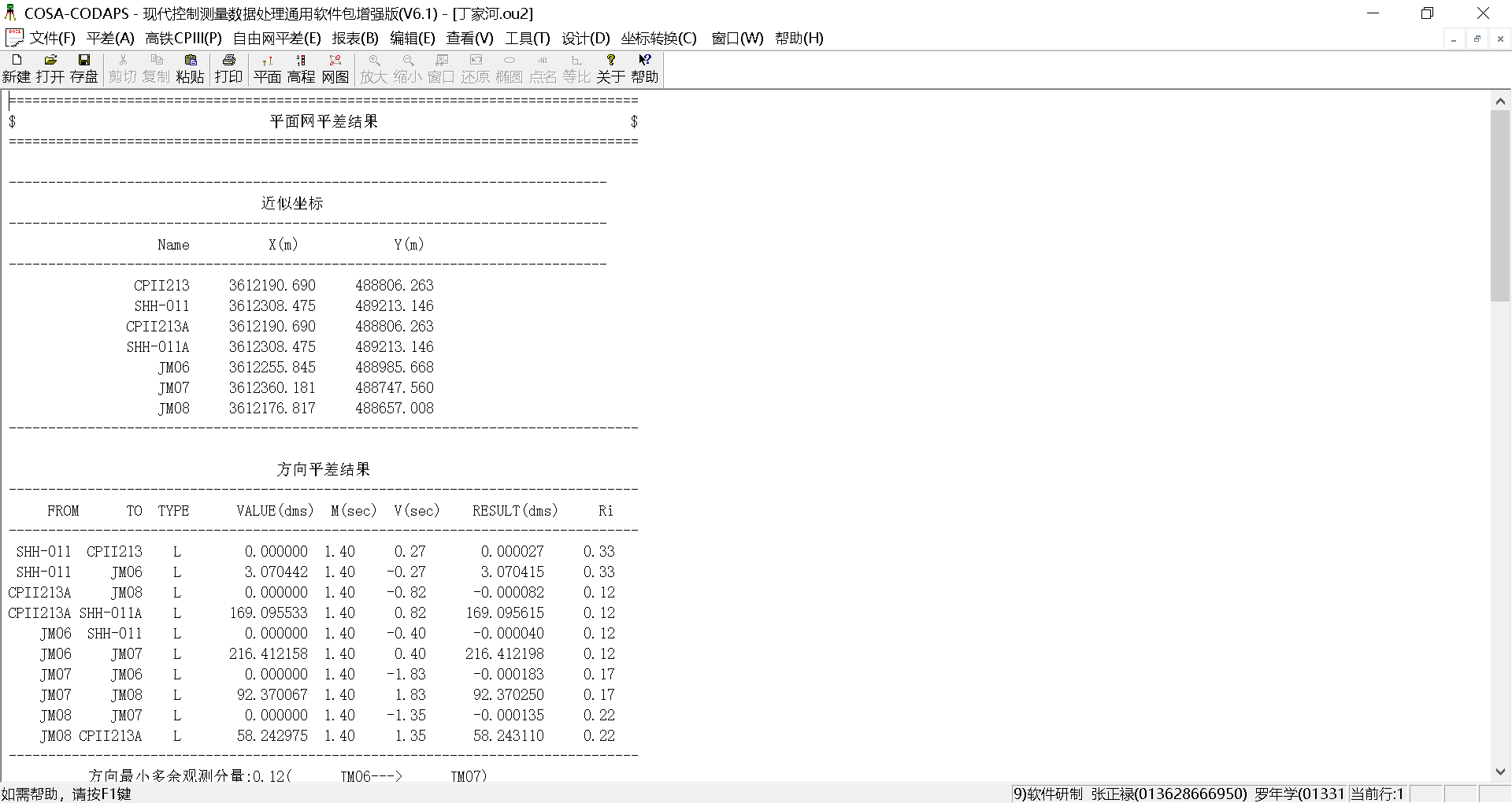
用鼠标单击“平差”栏中的“平面网”或单击工具条中平差快捷键,弹出对话框,在该对话框中选择并打开要进行平差的平面观测值文件,自动进行概算、组成并解算法方程、法方程求逆和精度评定及成果输出等工作,平差结果存于平面平差结果文件“网名.ou2”,并自动打开以供查看。
在平差过程中若出现迭代次数多且不收敛的情况,或出现其它提示,平差不能继续进行,首先应检查平面观测文件是否有大的错误。若平差结果文件的后验单位权中误差显著偏大(例如是先验单位权中误差的1.5倍以上),则应怀疑观测值可能含有粗差。对于观测值粗差,可以查看观测值改正数的大小并调用“工具”栏中“闭合差计算”菜单项,检查闭合差是否超限。
测边网特例:
由于边长交会的二义性,当交会某一点的边只有两条时,交会出的点可能是错误的,这时可以采用两种方法加以解决:
建立一个网形信息文件,文件名为“网名.NET”,该文件为标准ASCII文件,可以使用任意文本编辑器形成,其格式为:
点名1,点名2,点名3
点名1、点名2、点名3为边长交会三角形的三个顶点,按逆时针方向排列,每一个三角形组合占一行。
建立一个交会点的概略坐标文件,文件名为“网名.XYO”,其格式为:
点名 概略坐标X0 概略坐标Y0
概略坐标可以很粗糙,且只需要有二义性的交会点。
为了避免上述问题,布设纯测边网时,最好不要采用单三角形,应多增加跨三角形的长边,每个网点至少有三条边通过,这样可减少边长交会的二义性。
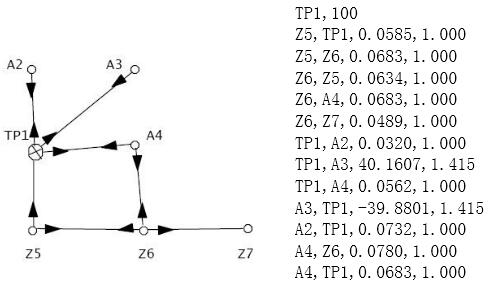
高程观测文件:
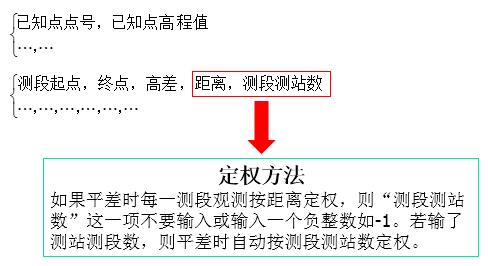
高程网示例:
实例1:常规附和导线平差操作方法
准备工具:平面观测文件:网名.in2、科傻软件:COSA-CODAPS – 现代控制测量数据处理通用软件包
操作步骤:
1)点击菜单栏“平差”——选择平面网。
2)选择平差文件*.IN2——打开——提示:平差完毕!
3)点击工具——闭合差计算——平面网——选择平差文件*.IN2——打开——提示:平面闭合差
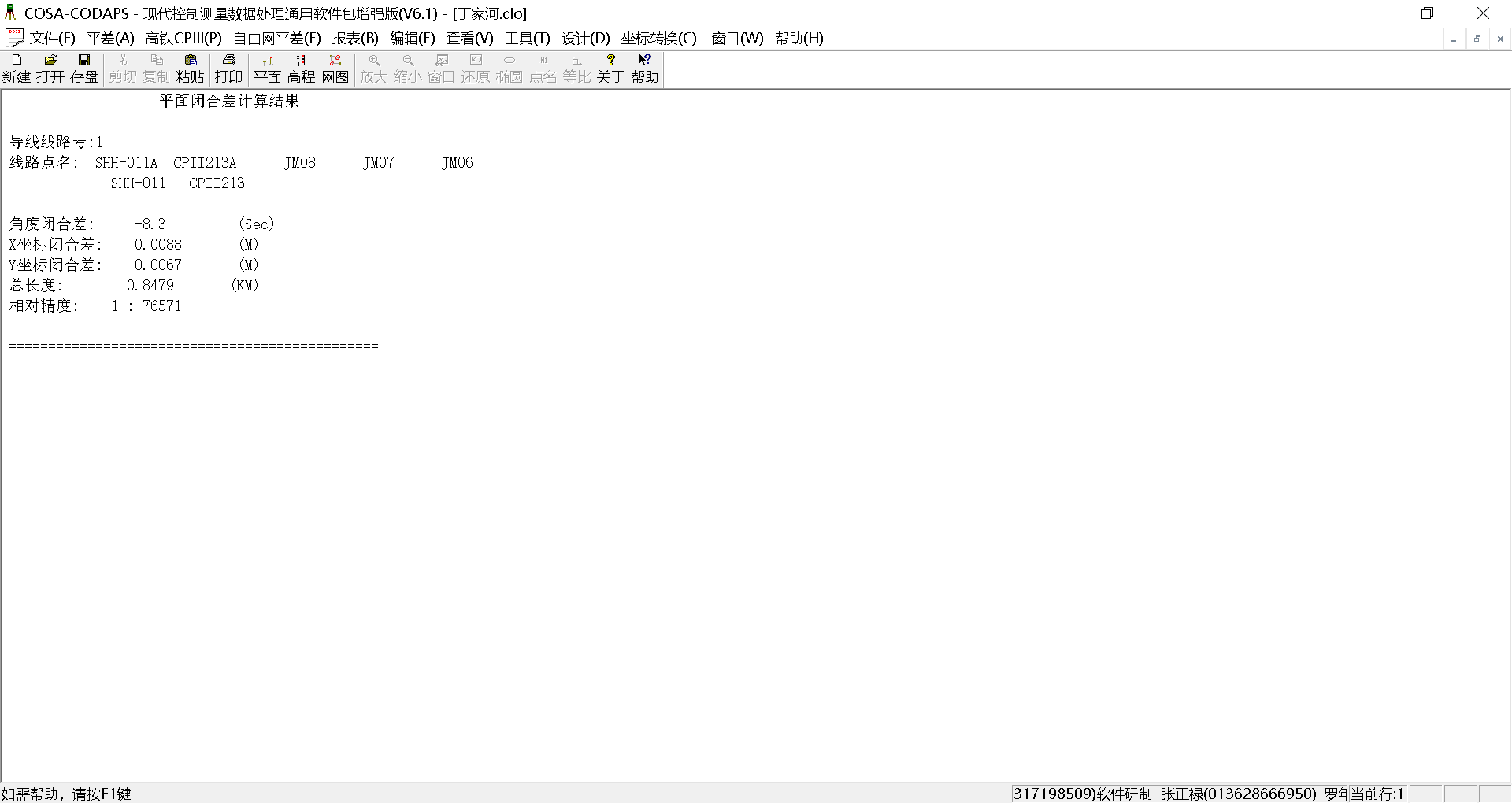
核对平面网平差结果,包括:近似坐标、方向平差结果、距离平差结果、平差坐标及其精度、最弱点及其精度、网点间边长、方位角及其相对精度、最弱边及其精度、单位权中误差和改正数带权平方和、控制网总体信息、平面闭合差计算结果是否符合规范要求。
(3)高程网平差
用鼠标单击“平差”栏中的“高程网”,或单击工具条中的快捷键,弹出对话框,在该对话框中选择并打开要进行平差的高程观测值文件,将自动进行高程网平差、精度评定及成果输出等工作。平差结果存于高程平差结果文件“网名.OU1”中,并自动打开以供查看。通过查看和分析后验单位权中误差值以及高差观测值的改正数,可以判断观测值和平差结果的质量。
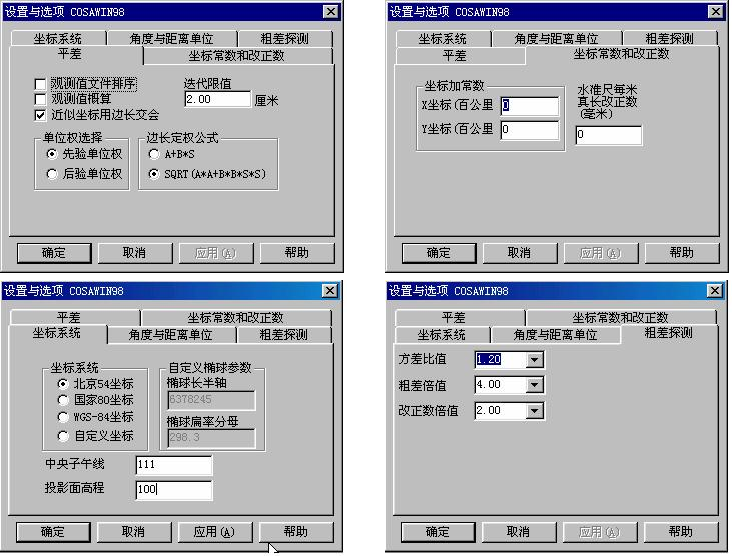
设置及选项:
常用工具:
平面闭合差计算
高程闭合差计算
贯通误差影响值计算
图形显绘
平差结果报表
坐标转换
平面网闭合差
启动该功能,首先由平面观测文件自动寻找出导线线路(DX)和最小独立闭合环线路(多边形DBX),生成计算闭合差线路文件“网名.CLI”。
根据闭合差线路文件,自动计算出导线和多边形的角度闭合差、坐标闭合差和全长闭合差,并进一步根据多边形角度闭合差计算方向观测值精度,对闭合差进行评价和超限提示。计算结果存放于闭合差结果文件“网名.CLO”中。
根据高程观测文件自动寻找出水准(高程)附合线路和最小独立闭合环线路,存放于闭合差线路文件“网名.GCI”中,根据闭合差线路文件,自动计算附合线路和多边形闭合环的高程闭合差并作超限提示,同时根据闭合环的闭合差计算每公里水准(高程)观测值的全中误差,计算结果存放于闭合差结果文件“网名.GCO”中。
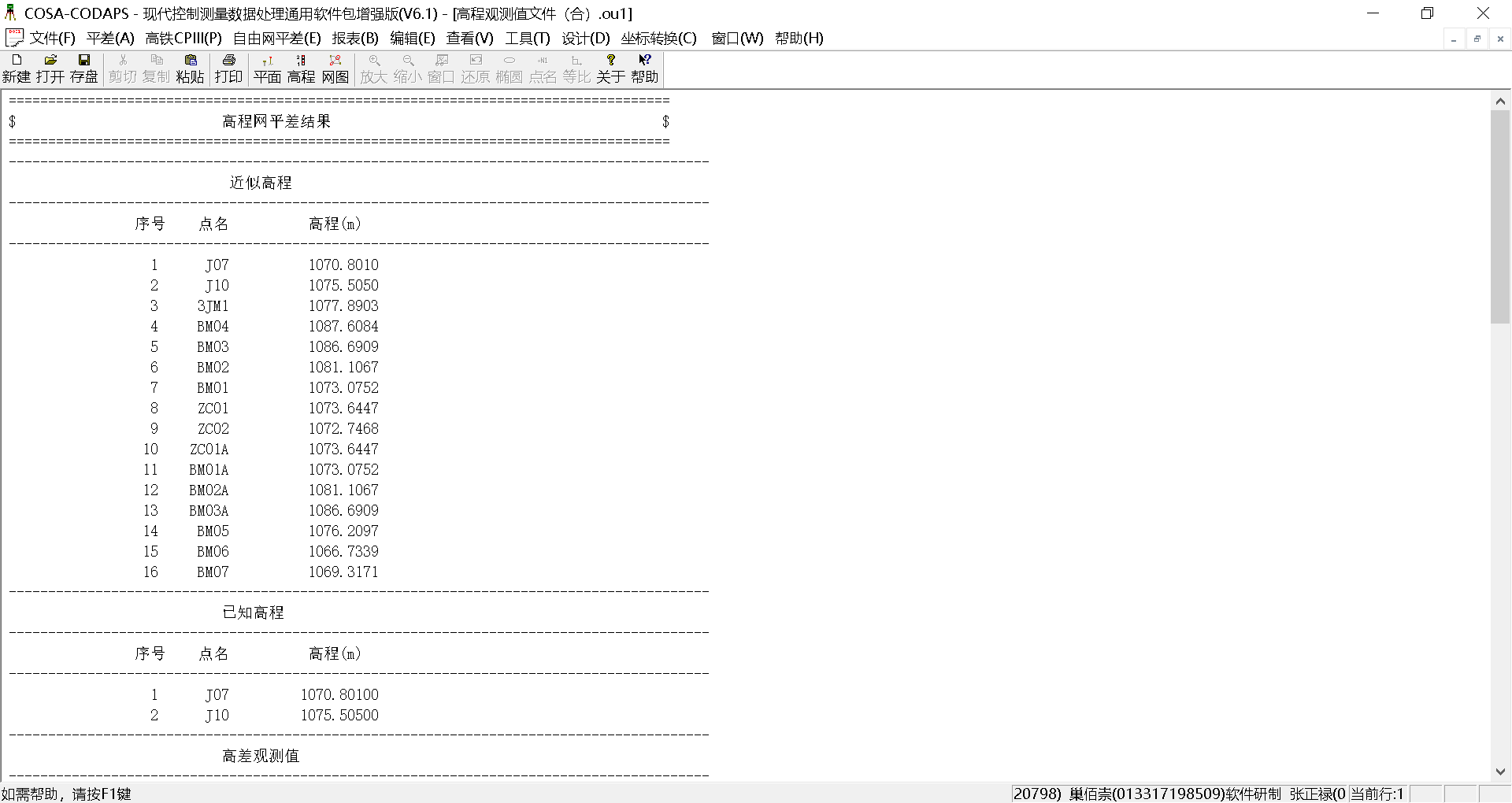
高程网平差结果报表:
实例2:常规闭合水准平差操作方法
准备工具:水准(高程)观测文件:网名.in1、科傻软件:COSA-CODAPS – 现代控制测量数据处理通用软件包
操作步骤:
1)点击菜单栏“平差”——选择高程网。

2)选择平差文件*.IN1——打开——提示:高程网平差完毕!
3)点击工具——闭合差计算——高程网——选择平差文件*.IN1——打开——提示:高程闭合差
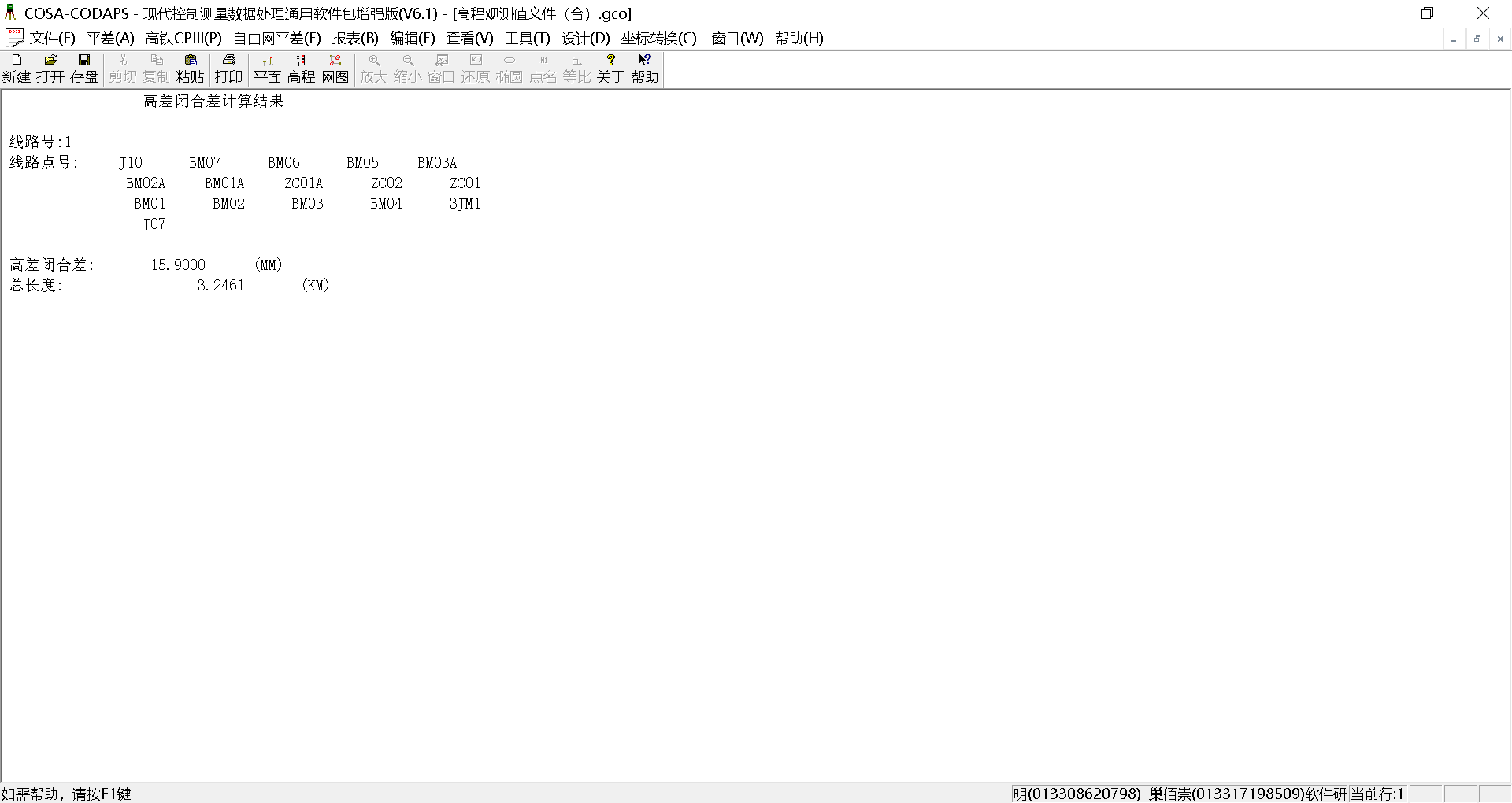
核对高程网平差结果,包括:近似高程、已知高程、高差观测值、平差后高程值、平差后高差值、单位权中误差和PVV结果是否符合规范要求。
(4)高斯平面坐标转换为大地经纬度
输入文件 *.XY
输出文件 *.BL
操作步骤:
1)在进行转换前选择“文件”菜单的“新建”项,编辑生成输入文件 *.XY,其格式为:
点名 X Y
2)设置坐标系参数:椭球长轴,椭球扁率分母,中央子午线。
3)在“坐标转换”菜单下选“XY->BL”子项进行转换。
4)结果文件格式为:
点名 B L
综合运用正算和反算可实现坐标换带计算。
本内容为作者个人观点,不代表学测量网站立场.
如对本文有异议或投诉,联系bd@xueceliang.cn
你好,科傻软件增强版(V6.1)方便分享吗,多谢了
您好,科傻软件V6.1属于授权版,请与武汉大学测绘学院相关老师联系!
大佬,天宝水准高程平差结果怎么设置成5位数呢
你好,一般平差软件的高程平差结果默认取位0.1mm(4位);
按照“《国家一、二等水准测量规范》 (GBT12897-2006)”,9.2.5 外业计算取位按表18规定,各测站高差取位0.01mm(5位),水准点高程取位1mm(3位);
软件的高程平差结果(水准点高程)取位0.1mm(4位)附合规范要求,不必设置0.01mm(5位)。